El objetivo de la investigación en inteligencia artificial (IA) ha sido comprender los principios que subyacen en el comportamiento inteligente y aplicarlos a la construcción de máquinas capaces de presentar dicho comportamiento. En los 50 años de vida de la disciplina se han buscado distintas definiciones de «inteligente», incluida la emulación del comportamiento humano y la capacidad de razonamiento lógico. En décadas recientes, sin embargo, ha surgido un consenso en torno a la idea de un agente racional que percibe y actúa para alcanzar sus objetivos al máximo. Subcampos como la robótica y el procesamiento de lenguajes naturales pueden entenderse como casos especiales del paradigma general. La IA ha incorporado la teoría de la probabilidad a la gestión de la incertidumbre, la teoría de la utilidad para definir objetivos y el aprendizaje estadístico para ayudar a las máquinas a adaptarse a circunstancias nuevas. Estos progresos han creado fuertes vínculos con otras disciplinas que aplican conceptos similares, incluidas la teoría del control, la economía, la investigación de operaciones y la estadística.

Vídeo de la banda pionera de música electrónica alemana Kraftwerk durante su actuación en la inauguración de su exposición retrospectiva Catalogue 12345678 en el Turbine Hall de la Tate Modern el 6 de febrero de 2013 en Londres, Reino Unido
Los progresos en IA parecen acelerarse. En los últimos años, debido en parte a los avances en el aprendizaje de las máquinas, tareas como el reconocimiento de voz, la identificación de objetos, la locomoción bípeda y la conducción autónoma se han resuelto en gran medida. Cada nueva destreza alcanzada trae consigo nuevos mercados potenciales y nuevos incentivos para seguir invirtiendo en investigación, lo que conduce a un ciclo virtuoso que impulsa la IA. En la próxima década es probable que asistamos a progresos sustanciales en comprensión efectiva del lenguaje, lo que conducirá a sistemas capaces de ingerir, sintetizar y contestar preguntas sobre la suma total del conocimiento humano.
A pesar de todos estos avances, seguimos lejos de la IA a nivel humano. Por ejemplo, no disponemos de métodos prácticos para inventar conceptos útiles como «electrón» o nuevas acciones útiles de alto nivel como «preparar diapositivas para la clase de mañana». Esta última destreza es especialmente importante para sistemas que operan en el mundo real, donde los objetivos que importan pueden requerir miles de millones de acciones básicas de control motor. Sin la capacidad de concebir ni razonar sobre acciones nuevas de alto nivel, son imposibles la planificación y la actuación en las escalas temporales que se manejan. Sin duda son necesarios más avances que no sabremos describir hasta que nuestros esfuerzos por construir sistemas IA polivalentes fracasen de maneras interesantes. La dificultad de predecir estos avances implica que dar una estimación precisa de la fecha en la que la IA alcanzará el nivel humano es imprudente. Sin embargo, la mayoría de expertos cree que es probable que ocurra en el presente siglo (Müller y Bostrom 2016; Etzioni 2016).
Es difícil exagerar la importancia de un acontecimiento así. Todo lo que ofrece nuestra civilización es consecuencia de la inteligencia; por tanto, el acceso a una inteligencia sustancialmente mayor supondría una discontinuidad en la historia de la humanidad. Podría conducir a soluciones de problemas como la enfermedad, la guerra y la pobreza; al mismo tiempo, varios observadores han señalado que los sistemas de IA superinteligentes pueden, por su propia naturaleza, tener impactos a escala global que podrían ser negativos para la humanidad de no estar bien diseñados.(1) La clave está en definir el problema que nuestros sistemas de IA tienen que resolver, para que podamos garantizar nuestra satisfacción con los resultados. Y lo que nos jugamos es mucho.
Riesgos y refutaciones
Las preocupaciones que suscita la IA superinteligente no son algo nuevo. Turing mismo, en una comunicación por radio de 1951, sintió la necesidad de apuntar la siguiente posibilidad: «Si una máquina puede pensar, es posible que piense de manera más inteligente que nosotros, y entonces ¿dónde nos coloca eso? Incluso si pudiéramos relegar a las máquinas a una posición de servidumbre, por ejemplo desenchufándolas en momentos estratégicos, deberíamos, como especie, extraer una lección de humildad […] Este nuevo peligro […] es, sin duda, algo que puede causarnos preocupación». Irving. J. Good (1965), que había trabajado con Turing durante la Segunda Guerra Mundial, fue más allá y apuntó la posibilidad de sistemas de IA que se automejoran. «Habría entonces, indudablemente, una “explosión de inteligencia”, y la inteligencia del hombre quedaría muy atrás.» El problema del control de la IA, por tanto, es cómo asegurarse de que los sistemas con un grado arbitrariamente alto de inteligencia permanecen bajo estricto dominio humano.
Parece razonable ser cauteloso a la hora de crear algo mucho más inteligente que nosotros mismos; sin embargo, necesitamos algo más que una sensación de inquietud generalizada para reconducir de manera correcta la despiadada presión científica y económica a la hora de construir sistemas cada vez más capaces. Muchas novelas y películas han trasladado esta inquietud a escenarios de máquinas conscientes espontáneamente malvadas, algo que es muy improbable y, como fenómeno técnico a evitar, imposible de abordar. De hecho, en la medida en que comprendemos el problema, la fuente de dificultades más probable parece ser un fracaso en el alineamiento de valores; a saber, que es posible que, sin darnos cuenta, dotemos a las máquinas de objetivos que no se alinean correctamente con los nuestros. Norbert Wiener (1960) lo expresó así: «Si usamos para nuestros fines una agencia mecánica en cuyo funcionamiento no podemos interferir de manera efectiva […] debemos asegurarnos de que el propósito que damos a la máquina es el que de verdad deseamos».
Por desgracia, ni la IA ni otras disciplinas construidas alrededor de la optimización de objetivos (economía, estadística, teoría del control e investigación de operaciones) tienen gran cosa que decir sobre cómo identificar los propósitos que de verdad deseamos. En lugar de ello, asumen que los objetivos son simplemente implantados en la máquina. La IA estudia la capacidad de conseguir objetivos, no el diseño de estos. Y, como descubrió el rey Midas, conseguir lo que uno desea no siempre es bueno.
Nick Bostrom (2014) expone varios argumentos adicionales que sugieren que el problema no tiene soluciones fáciles. El más relevante para el análisis de este artículo lo debemos a Omohundro (2008), quien observó que entidades inteligentes tenderán a actuar de maneras que preserven su propia existencia. Esta tendencia no tiene nada que ver con el instinto de autoconservación ni otros conceptos biológicos; simplemente, una entidad no puede lograr sus objetivos si está muerta. Esto significa que la ya citada confianza de Turing en la posibilidad de apagar la máquina no procede. Según la argumentación de Omohundro, una máquina superinteligente se las arreglará para anular la opción de apagado. Así pues, tenemos un horizonte de máquinas superinteligentes cuyas acciones son (por definición) impredecibles por parte de meros humanos, cuyos objetivos especificados de forma imperfecta e incompleta pueden entrar en conflicto con los nuestros y cuya motivación para preservar su propia existencia como vía para cumplir esos objetivos puede resultar insuperable.
Estos argumentos han despertado una serie de objeciones, en especial por parte de investigadores de IA. Las objeciones son reflejo de una actitud defensiva natural, unida tal vez a una falta de imaginación sobre lo que podrían hacer las máquinas superinteligentes. Nadie parece dispuesto a estudiar esto con detenimiento (si a simple vista alguna de las objeciones se antoja absurda, puedo asegurar que las hay más absurdas aún y que las omito para no avergonzar a sus autores). Varias de estas objeciones figuran en el reciente Informe AI100 (Stone et al. 2016), mientras que otras las hacen individuos que participan en paneles de debate en congresos de IA:
«La inteligencia artificial a nivel humano, es decir, similar a la humana, es imposible», se trata de una afirmación chocante cuando la hacen investigadores de IA que, desde tiempos de Turing, han tenido que rebatir aseveraciones similares por parte de filósofos y matemáticos. La afirmación, que no está fundamentada en argumentos ni en pruebas, parece admitir que si la IA superinteligente fuera posible, supondría un riesgo significativo. Es como si un conductor de autobús, con la humanidad entera como pasajeros, dijera: «Sí, estoy conduciendo hacia un precipicio, pero confiad en mí, ¡nos quedaremos sin gasolina antes de llegar!». La afirmación también supone una apuesta temeraria en contra del ingenio humano. En el pasado, hemos hecho apuestas semejantes a estas y hemos perdido. El 11 de septiembre de 1933, el famoso físico Ernest Rutherford afirmó, con gran seguridad: «Quien espere obtener una fuente de energía de la transformación de estos átomos es que está en la luna». El 12 de septiembre de 1933, el físico Leó Szilárd inventó la reacción nuclear en cadena inducida por neutrones. Unos años después, tras haber demostrado esta reacción en su laboratorio, Szilárd escribió: «Desenchufamos todo y nos fuimos a casa. Aquella noche tuve pocas dudas de que el mundo se dirigía hacia el sufrimiento».
«Es demasiado pronto para preocuparse por ello.» El momento de preocuparse por un problema potencialmente serio para la humanidad no depende de cuándo se producirá dicho problema, sino de cuánto tiempo se necesita para idear e implementar una solución que lo evite. Por ejemplo, si tuviéramos que detectar un asteroide de gran tamaño que se predice que va a colisionar con la Tierra en 2066, ¿diríamos que es demasiado pronto para preocuparnos? Y si consideramos los peligros catastróficos globales del calentamiento humano que se cree que sobrevendrán a finales del presente siglo, ¿es prematuro emprender acciones para prevenirlos? Al contrario, puede ser demasiado tarde. La escala temporal pertinente para la IA a nivel humano es menos predecible, pero en absoluto eso quiere decir que, al igual que la fisión nuclear, pueda llegar bastante antes de lo esperado.
«Es como preocuparse por la superpoblación en Marte» es una variación interesante de la afirmación «Es demasiado pronto para preocuparse» y que trae a la cabeza una analogía especialmente pertinente: no solo se trata de un riesgo muy futuro y de fácil gestión, también es extremadamente improbable que intentemos trasladar a miles de millones de personas a Marte. Sin embargo, la analogía es falsa. Ya estamos dedicando recursos científicos y técnicos ingentes para crear sistemas de IA cada vez más capaces. Así que un plan para trasladar la raza humana a Marte sin pensar antes en lo que respiraríamos, beberíamos o comeríamos al llegar allí, sería una analogía más adecuada.
«La IA a nivel humano no es una realidad inminente, así que no debemos preocuparnos». Es otra variación de «demasiado pronto para preocuparnos», pero que atribuye las preocupaciones sobre el control de la IA a la falsa creencia de que la IA superinteligente es inminente. Esa objeción sencillamente confunde los motivos de preocupación, que no se basan en la inminencia. Por ejemplo, Bostrom (2014), escribe: «En este libro no argumentamos en ningún momento que estemos en el umbral de un importante avance en IA, o que podamos predecir con ningún grado de precisión cuándo se producirá dicho avance».
«Nosotros somos los expertos, los que construimos los sistemas de IA; confiad en nosotros.» Esta objeción suele ir acompañada de una crítica a quienes plantean preocupaciones, acusándolos de ignorar la realidad de la IA. Aunque es cierto que algunos de los personajes públicos que han expresado preocupaciones, como Elon Musk, Stephen Hawking y Bill Gates, no son expertos en IA, sí están familiarizados con el razonamiento científico y tecnológico. Y sería difícil argumentar que Turing (1951), Good (1965), Wiener (1960) y Minsky (1984) no están cualificados para hablar de IA.
«No sois más que luditas.» Musk, Gates, Hawking y otros (incluido, al parecer, quien esto firma) recibieron en 2015 el premio Ludita del año que concede la fundación para la Información sobre Innovación en las Tecnologías. Una definición de ludita que incluye a Turing, Wiener, Minsky, Musk y Gate, algunos de los principales contribuyentes al progreso tecnológico de los siglos xx y xxi resulta, cuando menos, peculiar. Además, el epíteto refleja una comprensión del todo errónea de la naturaleza de las preocupaciones planteadas y el propósito de hacerlas públicas. Es como si se acusara de luditas a los ingenieros nucleares si plantearan la necesidad de controlar la fisión. Algunos objetores también emplean el término «antiAI», que viene a ser como llamar «antifísicos» a los ingenieros nucleares. El propósito de comprender y prevenir los riesgos de la IA es asegurar que podemos hacer reales los beneficios. Bostrom (2014), por ejemplo, afirma que el éxito a la hora de controlar la IA dará lugar a una «trayectoria civilizadora que conduzca a un uso solidario y jubiloso de la parcela cósmica de la humanidad».
«Vuestras predicciones apocalípticas no tienen en cuenta los beneficios potenciales de la IA.» Si la IA no tuviera beneficios potenciales, no habría interés económico o social por impulsar su investigación, y por tanto no existiría el peligro de lograr una IA comparable a la humana. Esta objeción es como acusar a los ingenieros nucleares que trabajan en contención de no tener nunca en cuenta los beneficios potenciales de la electricidad barata. El triste hecho es que los beneficios potenciales de la energía nuclear no han conseguido materializarse, en gran medida, precisamente porque no se prestó la atención debida a los riesgos de contención en Three Mile Island y Chernóbil.
«No se puede controlar la investigación.» En la actualidad nadie sugiere que pueda limitarse la investigación sobre IA, solo que hay que prestar atención al problema de prevenir consecuencias negativas de sistemas mal diseñados. Pero, si es necesario, podemos controlar la investigación: no diseñamos genéticamente seres humanos porque los biólogos moleculares decidieron, en un taller celebrado en Asilomar en 1975, que sería una mala idea, aunque «mejorar las reservas de humanos» era, desde varias décadas antes, el objetivo de numerosos investigadores del campo de la biología.
«No conviene mencionar los riesgos, puede afectar la financiación.» Véanse energía nuclear, tabaco, calentamiento global.
Además de estas objeciones en el campo de las políticas a seguir, hay otras que proponen soluciones simples para evitar las consecuencias negativas de la IA superinteligente.
«En lugar de introducir objetivos en el sistema, dejar que elija los que quiera.» No está nada claro cómo solucionaría esto el problema. Los criterios de acuerdo a los cuales un sistema de IA elegiría sus propios objetivos pueden muy bien considerarse metaobjetivos, y de nuevo nos enfrentamos al problema de cómo asegurar que conducen a comportamientos consistentes con el bienestar humano. Tenemos que rectificar el timón, no tirarlo por la borda.
«Los humanos más inteligentes tienden a tener objetivos más loables y altruistas, lo mismo ocurrirá con las máquinas superinteligentes.» Más allá del hecho de que quienes defienden este argumento se consideran más listos que la mayoría, hay, de hecho, escasísimas pruebas de la validez de la premisa de este argumento, y la premisa no proporciona apoyo ninguno a la conclusión.
«No os preocupéis, tendremos equipos humanos-IA que trabajarán en colaboración.» Una mala alineación de los valores impide trabajar en equipo, así que esta solución pasa por contestar antes a la pregunta de cómo solucionar el problema central de alineamiento de valores.
«No hay que incluir en la ecuación objetivos humanos como la autoconservación.» Véase la reflexión sobre el argumento de Omohundro anterior. Para un robot que sirve cafés, la muerte no es algo malo en sí mismo. Pero sí algo a evitar, porque es complicado servir café si estás muerto.
«No pasa nada, se apaga y ya está.» Como si una entidad superinteligente no fuera a contar con esa posibilidad.
Soluciones
Bostrom (2014) considera un número de propuestas técnicas más serias para resolver el problema de control de la IA. Algunos, bajo el encabezamiento de «oráculo de IA», proponen encerrar las máquinas en una suerte de cortafuegos y extraer de ellas trabajo útil tipo pregunta-respuesta, pero sin permitirles jamás intervenir en el mundo real. (¡Por supuesto que, esto implica renunciar a los robots superinteligentes!) Por desgracia, es poco probable que algo así funcione, pues todavía no hemos inventado un cortafuegos que actúe de manera segura contra simples humanos, y mucho menos contra máquinas superinteligentes. Otros hablan de restricciones probadamente aplicables al comportamiento, pero diseñarlas es como intentar escribir una ley fiscal sin resquicios (¡con evasores fiscales superinteligentes además!),
¿Podríamos, en lugar de ello, abordar la advertencia de Wiener? ¿Podemos diseñar sistemas de IA cuyos propósitos no entren en conflicto con los nuestros, de manera que nuestra satisfacción con su manera de comportarse esté asegurada? No es algo nada sencillo, pero puede ser factible si seguimos tres principios centrales:
- El propósito de la máquina es maximizar la puesta en práctica de valores humanos. Más concretamente, no tiene un propósito propio ni un deseo innato de protegerse.
- La máquina tiene una incertidumbre inicial respecto a cuáles son esos valores humanos. Esto resulta más crucial y, en cierto modo, elude el problema de Wiener. La máquina puede aprender más sobre valores humanos sobre la marcha, claro, pero es posible que nunca alcance total certidumbre.
- Las máquinas pueden aprender sobre valores humanos observando las elecciones que hacemos los humanos.
Resulta que estos tres principios, una vez incardinados en un marco matemático formal que defina el problema que la IA está inherentemente obligada a resolver, parecen permitir ciertos progresos en el problema de control de la IA. En particular, al menos en casos simples, podemos definir una plantilla para diseños de agentes probadamente beneficiosos bajo determinados supuestos razonables (si no ciertos).
Aprendizaje de funciones de recompensa
Para explicar el marco matemático, ser algo más precisos con la terminología ayuda. Según Von Neumann y Morgenstern (1994), a cualquier agente racional puede atribuírsele una función de utilidad U(s) que asigna un número real que representa la deseabilidad de existir en un estado del mundo particular cualquiera s. De modo equivalente, esta es la deseabilidad esperada de las posibles secuencias de estado futuras que empiezan por s, asumiendo que el agente actúa de forma óptima. (En investigación de operaciones, esto a menudo se conoce por función de valor, un término que tiene un significado distinto en economía.) Hay otra suposición posible de preferencias estacionarias (Koopmans 1972), según la cual la deseabilidad de una secuencia de estado cualquiera puede expresarse como una suma (que probablemente decrece con el tiempo) de recompensas inmediatas asociadas a cada estado de la secuencia. Por razones de conveniencia, la función de recompensa R(s, a, s’) se define de manera que sea la recompensa inmediata asociada a la transición del estado s al estado s’ mediante la acción a. Por lo general, la función recompensa proporciona una manera concisa de definir una tarea; por ejemplo, la tarea de jugar al backgammon puede definirse especificando que la recompensa sea = para todos los estados no terminales s’ y un número entre -192 y +192 para transiciones a estados terminales (el valor preciso dependerá del estado del cubo de doblar y de si el juego termina de una manera normal, con gammon o con backgammon). La utilidad de un estado de backgammon s, por otra parte, será en la mayoría de los casos una función muy compleja de s, porque representa una expectativa de secuencias de recompensa futuras respecto a todas los resultados posibles de los dados que se produzcan durante lo que queda de partida. Para una persona que está pasando un rato de disfrute en su jardín, las recompensas de oler una rosa pueden ser positivas (siempre que no la huela cien veces seguidas) y las de pincharse el dedo con las espinas negativas, mientras que la utilidad de estar en el jardín en ese momento dependerá de todas las recompensas futuras, y estas pueden variar enormemente en función de si uno está a punto de casarse, de cumplir una larga condena en la cárcel, etcétera.
En la medida en que sea posible definir de manera concisa objetivos especificando funciones de recompensa, el comportamiento puede explicarse de forma también concisa infiriendo funciones de recompensa. Esta es la idea clave que subyace en el llamado aprendizaje por refuerzo inverso (IRL, por sus siglas en inglés; Russell 1998; Ng y Russell 2000). Un algoritmo IRL aprende una función nueva observando el comportamiento de otro agente, del que se asume que actúa en consonancia con dicha función. El IRL es la forma secuencial de obtención de preferencias y está relacionado con el cálculo estructural de PDM (procesos de decisión de Márkov, en economía). Viendo a su dueño preparar café por la mañana, el robot doméstico aprende algo sobre la deseabilidad de tomar café en determinadas circunstancias, mientras que un robot de dueño inglés aprenderá sobre la deseabilidad de tomar el té en cualquier ocasión.
Resolver problemas sencillos de control de IA
Cabría imaginar que el IRL proporciona una solución sencilla al problema de alineamiento de valores: el robot observa el comportamiento humano, aprende la función de recompensa y se comporta de acuerdo a dicha función. Esta sencilla idea presenta dos problemas. El primero es obvio: el comportamiento humano (en especial por la mañana) a menudo transmite un deseo de tomar café, y el robot puede aprender esto, pero ¡no queremos que el robot quiera tomar café! Este defecto es fácil de solucionar; necesitamos reformular el problema de alineamiento de valores de manera que el robot siempre tenga el mismo objetivo de optimizar la recompensa para el humano (el principio 1 expuesto anteriormente) y se vuelva más capaz de hacerlo a medida que aprenda cuál es la función de recompensa humana.
El segundo problema es menos obvio y menos fácil de solucionar. Al humano le interesa asegurar que el alineamiento de valores se produzca de la forma más rápida y precisa posible, de forma que el robot pueda ser útil al máximo y se eviten errores potencialmente desastrosos. Sin embargo, actuar de forma óptima en la adquisición de café limitando al robot a un papel pasivo puede no ser la manera idónea de conseguir el alineamiento de valores. En lugar de ello, el humano tal vez debería explicar los pasos necesarios para preparar café, así como enseñar al robot dónde se guarda el café y qué hacer si se deja demasiado tiempo la cafetera encendida, mientras que el robot puede preguntar para qué sirve el botón de hacer espuma y probar a preparar café bajo la supervisión de un humano, incluso si los primeros resultados son imbebibles. Ninguna de estas posibilidades encaja en el marco del IRL.
Si se extiende el aprendizaje inverso por refuerzo de manera que incorpore como agentes tanto al robot como al humano, entonces es posible formular y solucionar un problema de alineamiento de valores, convirtiéndolo en un proceso de maximización de recompensa cooperativo e interactivo (Hadfield-Menell et al. 2017a). Más concretamente, un problema de aprendizaje inverso cooperativo por refuerzo (CIRL, por sus siglas en inglés) es una partida para dos jugadores con información parcial en la que el humano conoce la función de recompensa(2) y el robot no, pero la recompensa del robot es idéntica a la del humano. Por tanto, el CIRL encarna los tres principios enunciados anteriormente. Las soluciones óptimas a este juego maximizan la recompensa humana y pueden generar de forma natural instrucción activa por parte del humano y aprendizaje activo por parte del robot.
En el marco del CIRL, se puede formular y resolver el problema de desenchufar, es decir, el problema de evitar que un robot inutilice su botón de apagado. (Así Turing puede estar tranquilo.) Es seguro que un robot diseñado para resolver el problema del CIRL quiere maximizar valores humanos, pero también es seguro que no sabe con exactitud cuáles son. Ahora bien, el robot se beneficia de hecho de que lo apaguen porque entiende que el humano pulsará el interruptor para evitar que el robot haga alguna cosa contraria a los valores humanos. Así, el robot tiene un incentivo positivo para respetar el interruptor de apagado y este incentivo deriva directamente de su incertidumbre respecto a los valores humanos. Además, es posible demostrar que en algunos casos el robot es probadamente beneficioso, a saber, la recompensa esperada por el humano es mayor cuando hay un robot capaz de resolver problemas de CIRL con independencia de cuál sea la función de recompensa real del humano (Hadfield-Menell et al. 2017b).
El ejemplo del interruptor de apagado sugiere algunas fórmulas para el diseño de agentes controlables y nos proporciona al menos un caso de sistema de beneficio probado. El enfoque general guarda cierta similitud con el diseño de mecanismos de resolución de problemas en matemáticas, donde uno trata de incentivar a otros agentes para que se comporten de maneras que sean probadamente beneficiosas para el diseñador del mecanismo. La diferencia fundamental es que aquí estamos construyendo a uno de los agentes para que beneficie al otro.
El ejemplo de apagado funciona debido al principio 2, es decir, que el robot debería tener incertidumbre respecto a la verdadera función de recompensa del humano. Por extraño que parezca, la incertidumbre respecto a la recompensa ha sido ignorada casi por completo en IA, a pesar de que la incertidumbre respecto al conocimiento del campo de acción y la interpretación de sensores ha sido una preocupación central durante veinte años. La razón puede ser que la incertidumbre respecto a la función de recompensa es irrelevante en problemas de decisiones secuenciales estándar (procesos de decisión de Márkov o MDP, MDP parcialmente observables o POMDP y problemas de control óptimo), porque la política óptima con una función de recompensa incierta es idéntica a la política óptima con una función de recompensa definida equivalente al valor esperado de la función de recompensa incierta. Sin embargo, esta equivalencia solo se mantiene cuando el entorno no proporciona ulterior información sobre la verdadera función de recompensa, que no es el caso de problemas de CIRL, donde las acciones humanas revelan información sobre preferencias humanas. Cuando el entorno sí puede proporcionar información adicional sobre la función de recompensa, los agentes con incertidumbre respecto a esta pueden presentar comportamientos que no podrían realizar sistemas de IA tradicionales con funciones de recompensa fijas.
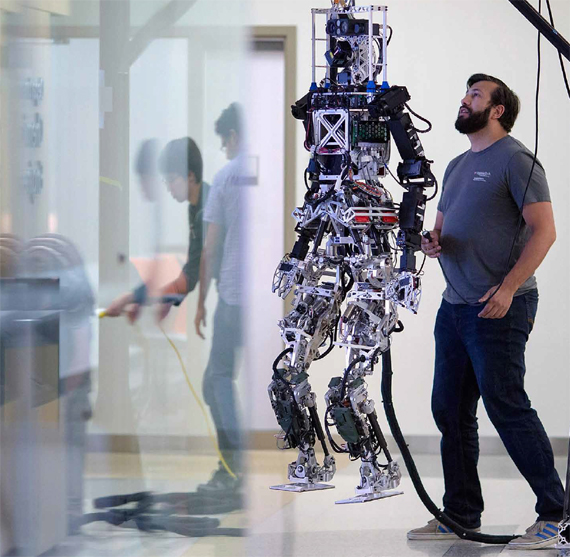
Un miembro de Team Valor prueba el robot THOR durante la preparación del Desafío Robótico (Robotics Challenge) de DARPA, la agencia de investigación de proyectos avanzados de defensa en el TREC (laboratorio de ingeniería y control de robótica terrestre) del Virginia Tech
En este punto, el lector familiarizado con el concepto de aprendizaje por refuerzo (RL, por sus siglas en inglés) podría aducir que la «señal recompensa» que recibe el agente RL después de cada transición estado-acción-estado sí proporciona información sobre la verdadera función de recompensa, porque da el valor real de R(s, a, s’) para la transición producida. Así pues, ¿podría el aprendizaje por refuerzo ordinario constituir una base para el alineamiento de valores si el humano se limita a suministrar una señal de recompensa directamente al robot? ¡Por fortuna no! En primer lugar, el humano puede no ser capaz de cuantificar la recompensa de forma precisa, ni siquiera para transiciones específicas ya experimentadas. En segundo lugar, el modelo formal de RL asume que la señal de recompensa le llega al agente de fuera del entorno; pero el humano y el robot son parte del mismo entorno, y el robot puede maximizar su recompensa modificando al humano de manera que le proporcione en todo momento una señal de recompensa máxima. Lo indeseable de este resultado, conocido como wireheading o estimulación directa (Muehlhauser y Hibbard 2014), pone de manifiesto un error de base en la formulación estándar del RL. El error es que el entorno no puede proporcionar una recompensa real al agente; tan solo información sobre la recompensa. Así, un humano que emite una «señal de recompensa» al robot no le está dando una recompensa, sino proporcionándole pruebas (probablemente ruidosas) de sus preferencias en forma de una acción que selecciona un número. Esta nueva formulación evita claramente el problema de wireheading porque el robot solo saldrá perdiendo si modifica la fuente de información para enmascarar la señal subyacente. Y si la formulación estipula que el robot tiene que maximizar la función de recompensa original, entonces modificar al humano de manera que tenga una función de recompensa nueva más sencilla de maximizar no le hace ningún bien al robot.
Consideraciones prácticas
He argumentado que el marco para el aprendizaje inverso por refuerzo puede ser el primer paso para una resolución teórica del problema de control en IA. Hay también razones para creer que el enfoque puede funcionar en la práctica. En primer lugar, hay ingentes cantidades de información escrita y filmada sobre humanos haciendo cosas (y otros humanos reaccionando). La tecnología necesaria para construir modelos de valores humanos a partir de estos archivos estará disponible mucho antes de que se creen sistemas de IA superinteligentes. En segundo lugar, existen incentivos muy poderosos y a corto plazo para que los robots entiendan los valores humanos: si un robot doméstico mal diseñado cocina al gato para cenar porque no entiende que su valor sentimental excede con mucho su valor nutricional, el sector de los robots domésticos quebrará. En el campo de los asistentes personales digitales, que probablemente se convertirá en un mercado importante antes de que termine la década, un asistente que se adapta con rapidez a las preferencias complejas y llenas de matices de su dueño presenta beneficios obvios.
Un enfoque basado en el aprendizaje de valores a partir del comportamiento humano, no obstante, plantea problemas evidentes. Los humanos son irracionales, incoherentes, pusilánimes y computacionalmente limitados, de manera que sus acciones no siempre reflejan sus valores (pensemos, por ejemplo, en dos humanos que juegan al ajedrez; por lo general uno de ellos pierde, ¡pero no adrede!). Los humanos también son diversos en cuanto a valores y circunstancias, lo que quiere decir que los robots deben ser receptivos a las preferencias individuales y mediar en conflictos de preferencias, un problema tanto para científicos sociales como para ingenieros. Y algunos humanos son malvados, así que el robot debe poder ser capaz de filtrar valores de sistemas individuales que sean incompatibles con el bienestar general.
Parece probable que los robots puedan aprender de comportamientos humanos no racionales solo con la ayuda de modelos cognitivos de humanos muy mejorados. ¿Y qué pasa con el comportamiento indeseable? ¿Es posible evitar corromper a nuestros robots sin imponer limitaciones adquiridas (y que por tanto varían según las culturas) a los valores que estamos dispuestos a permitir? Tal vez se pueda usar una versión del imperativo categórico de Kant, según la cual una función de recompensa que asignara valor negligible o negativo al bienestar de los demás carecería de autoconsistencia, en el sentido de que si todos operaran con dicha función de recompensa, entonces ninguno la obtendría.
Síntesis
He argumentado, siguiendo a numerosos autores, que encontrar una solución al problema de control de la IA es una tarea importante. Más concretamente y en las sonoras palabras de Bostrom, «la tarea esencial de nuestra época». También he argumentado que, hasta el momento, la IA se ha centrado en sistemas capaces de tomar mejor decisiones, pero que esto no es lo mismo que tomar decisiones mejores. Por muy excelentemente que maximice un algoritmo, y por muy preciso que sea su modelo del mundo, las decisiones de una máquina pueden ser estúpidas a los ojos de un humano normal y corriente si su función de utilidad no está bien alineada con los valores humanos.
Este problema exige cambiar la definición misma de IA, que debe dejar de ser un campo que se ocupa de la inteligencia pura, con independencia del objetivo, y ser uno que se ocupe de sistemas probadamente beneficiosos para los humanos. (Supongo que también podríamos diseñar sistemas de IA para otras especies, pero no creo que sea una prioridad ahora mismo.) Tomarse en serio el problema ha dado lugar a nuevas maneras de enfocar la IA, sus propósitos y nuestra relación con ella.
1. Existen otros posibles riesgos del uso indebido de una IA cada vez más potente, incluidos la vigilancia automática y la persuasión, las armas autónomas y la disrupción económica; deben ser estudiadas en profundidad, pero no son el tema del presente artículo.
2. Cabría preguntarse: ¿por qué un humano que conoce la función de recompensa no se limita a programarla en el robot? Aquí usamos «saber» en el sentido restringido de como si uno conociera la función de recompensa, sin ser necesariamente capaz de hacerla explícita. Es como cuando un humano «conoce» la diferencia de pronunciación entre la letra g en gente y en guante sin ser capaz de poner por escrito la regla ortográfica.
— Bostrom, N., Superintelligence, Oxford, Oxford University Press, 2014 [Ed. esp. Superinteligencia, Zaragoza, Teell, 2016].
— Etzioni, O., «Are the Experts Worried About the Existential Risk of Artificial Intelligence?», en MIT Technology Review, 2016.
— Good, I. J., «Speculations Concerning the First Ultraintelligent Machine», en Alt, F. L. y Rubinoff, M. (eds.), Advances in Computers 6, Nueva York, Academic Press, 1965.
— Hadfield-Menell, D., Dragan, A., Abbeel, P. y Russell, S., «Cooperative Inverse Reinforcement Learning», en Advances in Neural Information Processing Systems 25, Cambridge, Massachusetts, The MIT Press, 2017a.
— Hadfield-Menell, D., Dragan, A., Abbeel, P. y Russell, S., «The off-switch», en la 31ª Conferencia AAAI sobre Inteligencia Artificial (AAAI-17), 2017b.
— Koopmans, T. C., «Representation of Preference Orderings over Time», en McGuire, C. B. y Radner, R. (eds.), Decision and Organization, Ámsterdam, Elsevier/North-Holland, 1972.
— Minsky, M., «Afterword to Vernor Vinge’s novel, “True Names”», manuscrito inédito, 1984.
— Muehlhauser, L. y Hibbard, B., «Exploratory Engineering in Artificial Intelligence», en Communications of the ACM, vol. 57, n.º 9, 2014, pp. 32-34.
— Müller, V. C. y Bostrom, N., «Future Progress in Artificial Intelligence: A Survey of Expert Opinion», en Müller, V. C. (ed.), Fundamental Issues of Artificial Intelligence, Berlín, Springer, Synthèse Library, vol. 376, 2016.
— Ng., A. Y. y Russell, S., «Algorithms for Inverse Reinforcement Learning», Actas de la XVII Conferencia Internacional sobre Aprendizaje Automático, Stanford, California, Morgan Kaufmann, 2000.
— Omohundro, S. M., «The Basic AI Drives», en Proceedings of the First AGI Conference, IOS Press, 2008.
— Russell, S., «Learning Agents for Uncertain Environments (extended abstract)», en Proc. COLT-98, Madison, Wisconsin, ACM Press, 1998.
— Stone, P. et al., «Artificial Intelligence and Life in 2030», en One Hundred Year Study on Artificial Intelligence, informe del Panel de Estudio 2015, Universidad de Stanford, septiembre de 2016.
— Turing, A. M., «Can digital Machines Think?», 1951. Conferencia retransmitida por la BBC, transcripción en inglés en turingarchive.org
— Von Neumann, J. y Morgenstern, O., Theory of Games and Economic Behavior, 1ª ed., Princenton, Princeton University Press, 1944.
— Wiener, N., «Some Moral and Technical Consequences of Automation», en Science, vol. 131, n.º 3.410, 1960, pp. 1.355-1.358.


El objetivo de la investigación en inteligencia artificial (IA) ha sido comprender los principios que subyacen en el comportamiento inteligente y aplicarlos a la construcción de máquinas capaces de presentar dicho comportamiento. En los 50 años de vida de la disciplina se han buscado distintas definiciones de «inteligente», incluida la emulación del comportamiento humano y la capacidad de razonamiento lógico. En décadas recientes, sin embargo, ha surgido un consenso en torno a la idea de un agente racional que percibe y actúa para alcanzar sus objetivos al máximo. Subcampos como la robótica y el procesamiento de lenguajes naturales pueden entenderse como casos especiales del paradigma general. La IA ha incorporado la teoría de la probabilidad a la gestión de la incertidumbre, la teoría de la utilidad para definir objetivos y el aprendizaje estadístico para ayudar a las máquinas a adaptarse a circunstancias nuevas. Estos progresos han creado fuertes vínculos con otras disciplinas que aplican conceptos similares, incluidas la teoría del control, la economía, la investigación de operaciones y la estadística.
Vídeo de la banda pionera de música electrónica alemana Kraftwerk durante su actuación en la inauguración de su exposición retrospectiva Catalogue 12345678 en el Turbine Hall de la Tate Modern el 6 de febrero de 2013 en Londres, Reino Unido
Los progresos en IA parecen acelerarse. En los últimos años, debido en parte a los avances en el aprendizaje de las máquinas, tareas como el reconocimiento de voz, la identificación de objetos, la locomoción bípeda y la conducción autónoma se han resuelto en gran medida. Cada nueva destreza alcanzada trae consigo nuevos mercados potenciales y nuevos incentivos para seguir invirtiendo en investigación, lo que conduce a un ciclo virtuoso que impulsa la IA. En la próxima década es probable que asistamos a progresos sustanciales en comprensión efectiva del lenguaje, lo que conducirá a sistemas capaces de ingerir, sintetizar y contestar preguntas sobre la suma total del conocimiento humano.
A pesar de todos estos avances, seguimos lejos de la IA a nivel humano. Por ejemplo, no disponemos de métodos prácticos para inventar conceptos útiles como «electrón» o nuevas acciones útiles de alto nivel como «preparar diapositivas para la clase de mañana». Esta última destreza es especialmente importante para sistemas que operan en el mundo real, donde los objetivos que importan pueden requerir miles de millones de acciones básicas de control motor. Sin la capacidad de concebir ni razonar sobre acciones nuevas de alto nivel, son imposibles la planificación y la actuación en las escalas temporales que se manejan. Sin duda son necesarios más avances que no sabremos describir hasta que nuestros esfuerzos por construir sistemas IA polivalentes fracasen de maneras interesantes. La dificultad de predecir estos avances implica que dar una estimación precisa de la fecha en la que la IA alcanzará el nivel humano es imprudente. Sin embargo, la mayoría de expertos cree que es probable que ocurra en el presente siglo (Müller y Bostrom 2016; Etzioni 2016).
Es difícil exagerar la importancia de un acontecimiento así. Todo lo que ofrece nuestra civilización es consecuencia de la inteligencia; por tanto, el acceso a una inteligencia sustancialmente mayor supondría una discontinuidad en la historia de la humanidad. Podría conducir a soluciones de problemas como la enfermedad, la guerra y la pobreza; al mismo tiempo, varios observadores han señalado que los sistemas de IA superinteligentes pueden, por su propia naturaleza, tener impactos a escala global que podrían ser negativos para la humanidad de no estar bien diseñados.(1) La clave está en definir el problema que nuestros sistemas de IA tienen que resolver, para que podamos garantizar nuestra satisfacción con los resultados. Y lo que nos jugamos es mucho.
Riesgos y refutaciones
Las preocupaciones que suscita la IA superinteligente no son algo nuevo. Turing mismo, en una comunicación por radio de 1951, sintió la necesidad de apuntar la siguiente posibilidad: «Si una máquina puede pensar, es posible que piense de manera más inteligente que nosotros, y entonces ¿dónde nos coloca eso? Incluso si pudiéramos relegar a las máquinas a una posición de servidumbre, por ejemplo desenchufándolas en momentos estratégicos, deberíamos, como especie, extraer una lección de humildad […] Este nuevo peligro […] es, sin duda, algo que puede causarnos preocupación». Irving. J. Good (1965), que había trabajado con Turing durante la Segunda Guerra Mundial, fue más allá y apuntó la posibilidad de sistemas de IA que se automejoran. «Habría entonces, indudablemente, una “explosión de inteligencia”, y la inteligencia del hombre quedaría muy atrás.» El problema del control de la IA, por tanto, es cómo asegurarse de que los sistemas con un grado arbitrariamente alto de inteligencia permanecen bajo estricto dominio humano.
Parece razonable ser cauteloso a la hora de crear algo mucho más inteligente que nosotros mismos; sin embargo, necesitamos algo más que una sensación de inquietud generalizada para reconducir de manera correcta la despiadada presión científica y económica a la hora de construir sistemas cada vez más capaces. Muchas novelas y películas han trasladado esta inquietud a escenarios de máquinas conscientes espontáneamente malvadas, algo que es muy improbable y, como fenómeno técnico a evitar, imposible de abordar. De hecho, en la medida en que comprendemos el problema, la fuente de dificultades más probable parece ser un fracaso en el alineamiento de valores; a saber, que es posible que, sin darnos cuenta, dotemos a las máquinas de objetivos que no se alinean correctamente con los nuestros. Norbert Wiener (1960) lo expresó así: «Si usamos para nuestros fines una agencia mecánica en cuyo funcionamiento no podemos interferir de manera efectiva […] debemos asegurarnos de que el propósito que damos a la máquina es el que de verdad deseamos».
Por desgracia, ni la IA ni otras disciplinas construidas alrededor de la optimización de objetivos (economía, estadística, teoría del control e investigación de operaciones) tienen gran cosa que decir sobre cómo identificar los propósitos que de verdad deseamos. En lugar de ello, asumen que los objetivos son simplemente implantados en la máquina. La IA estudia la capacidad de conseguir objetivos, no el diseño de estos. Y, como descubrió el rey Midas, conseguir lo que uno desea no siempre es bueno.
Nick Bostrom (2014) expone varios argumentos adicionales que sugieren que el problema no tiene soluciones fáciles. El más relevante para el análisis de este artículo lo debemos a Omohundro (2008), quien observó que entidades inteligentes tenderán a actuar de maneras que preserven su propia existencia. Esta tendencia no tiene nada que ver con el instinto de autoconservación ni otros conceptos biológicos; simplemente, una entidad no puede lograr sus objetivos si está muerta. Esto significa que la ya citada confianza de Turing en la posibilidad de apagar la máquina no procede. Según la argumentación de Omohundro, una máquina superinteligente se las arreglará para anular la opción de apagado. Así pues, tenemos un horizonte de máquinas superinteligentes cuyas acciones son (por definición) impredecibles por parte de meros humanos, cuyos objetivos especificados de forma imperfecta e incompleta pueden entrar en conflicto con los nuestros y cuya motivación para preservar su propia existencia como vía para cumplir esos objetivos puede resultar insuperable.
Estos argumentos han despertado una serie de objeciones, en especial por parte de investigadores de IA. Las objeciones son reflejo de una actitud defensiva natural, unida tal vez a una falta de imaginación sobre lo que podrían hacer las máquinas superinteligentes. Nadie parece dispuesto a estudiar esto con detenimiento (si a simple vista alguna de las objeciones se antoja absurda, puedo asegurar que las hay más absurdas aún y que las omito para no avergonzar a sus autores). Varias de estas objeciones figuran en el reciente Informe AI100 (Stone et al. 2016), mientras que otras las hacen individuos que participan en paneles de debate en congresos de IA:
«La inteligencia artificial a nivel humano, es decir, similar a la humana, es imposible», se trata de una afirmación chocante cuando la hacen investigadores de IA que, desde tiempos de Turing, han tenido que rebatir aseveraciones similares por parte de filósofos y matemáticos. La afirmación, que no está fundamentada en argumentos ni en pruebas, parece admitir que si la IA superinteligente fuera posible, supondría un riesgo significativo. Es como si un conductor de autobús, con la humanidad entera como pasajeros, dijera: «Sí, estoy conduciendo hacia un precipicio, pero confiad en mí, ¡nos quedaremos sin gasolina antes de llegar!». La afirmación también supone una apuesta temeraria en contra del ingenio humano. En el pasado, hemos hecho apuestas semejantes a estas y hemos perdido. El 11 de septiembre de 1933, el famoso físico Ernest Rutherford afirmó, con gran seguridad: «Quien espere obtener una fuente de energía de la transformación de estos átomos es que está en la luna». El 12 de septiembre de 1933, el físico Leó Szilárd inventó la reacción nuclear en cadena inducida por neutrones. Unos años después, tras haber demostrado esta reacción en su laboratorio, Szilárd escribió: «Desenchufamos todo y nos fuimos a casa. Aquella noche tuve pocas dudas de que el mundo se dirigía hacia el sufrimiento».
«Es demasiado pronto para preocuparse por ello.» El momento de preocuparse por un problema potencialmente serio para la humanidad no depende de cuándo se producirá dicho problema, sino de cuánto tiempo se necesita para idear e implementar una solución que lo evite. Por ejemplo, si tuviéramos que detectar un asteroide de gran tamaño que se predice que va a colisionar con la Tierra en 2066, ¿diríamos que es demasiado pronto para preocuparnos? Y si consideramos los peligros catastróficos globales del calentamiento humano que se cree que sobrevendrán a finales del presente siglo, ¿es prematuro emprender acciones para prevenirlos? Al contrario, puede ser demasiado tarde. La escala temporal pertinente para la IA a nivel humano es menos predecible, pero en absoluto eso quiere decir que, al igual que la fisión nuclear, pueda llegar bastante antes de lo esperado.
«Es como preocuparse por la superpoblación en Marte» es una variación interesante de la afirmación «Es demasiado pronto para preocuparse» y que trae a la cabeza una analogía especialmente pertinente: no solo se trata de un riesgo muy futuro y de fácil gestión, también es extremadamente improbable que intentemos trasladar a miles de millones de personas a Marte. Sin embargo, la analogía es falsa. Ya estamos dedicando recursos científicos y técnicos ingentes para crear sistemas de IA cada vez más capaces. Así que un plan para trasladar la raza humana a Marte sin pensar antes en lo que respiraríamos, beberíamos o comeríamos al llegar allí, sería una analogía más adecuada.
«La IA a nivel humano no es una realidad inminente, así que no debemos preocuparnos». Es otra variación de «demasiado pronto para preocuparnos», pero que atribuye las preocupaciones sobre el control de la IA a la falsa creencia de que la IA superinteligente es inminente. Esa objeción sencillamente confunde los motivos de preocupación, que no se basan en la inminencia. Por ejemplo, Bostrom (2014), escribe: «En este libro no argumentamos en ningún momento que estemos en el umbral de un importante avance en IA, o que podamos predecir con ningún grado de precisión cuándo se producirá dicho avance».
«Nosotros somos los expertos, los que construimos los sistemas de IA; confiad en nosotros.» Esta objeción suele ir acompañada de una crítica a quienes plantean preocupaciones, acusándolos de ignorar la realidad de la IA. Aunque es cierto que algunos de los personajes públicos que han expresado preocupaciones, como Elon Musk, Stephen Hawking y Bill Gates, no son expertos en IA, sí están familiarizados con el razonamiento científico y tecnológico. Y sería difícil argumentar que Turing (1951), Good (1965), Wiener (1960) y Minsky (1984) no están cualificados para hablar de IA.
«No sois más que luditas.» Musk, Gates, Hawking y otros (incluido, al parecer, quien esto firma) recibieron en 2015 el premio Ludita del año que concede la fundación para la Información sobre Innovación en las Tecnologías. Una definición de ludita que incluye a Turing, Wiener, Minsky, Musk y Gate, algunos de los principales contribuyentes al progreso tecnológico de los siglos xx y xxi resulta, cuando menos, peculiar. Además, el epíteto refleja una comprensión del todo errónea de la naturaleza de las preocupaciones planteadas y el propósito de hacerlas públicas. Es como si se acusara de luditas a los ingenieros nucleares si plantearan la necesidad de controlar la fisión. Algunos objetores también emplean el término «antiAI», que viene a ser como llamar «antifísicos» a los ingenieros nucleares. El propósito de comprender y prevenir los riesgos de la IA es asegurar que podemos hacer reales los beneficios. Bostrom (2014), por ejemplo, afirma que el éxito a la hora de controlar la IA dará lugar a una «trayectoria civilizadora que conduzca a un uso solidario y jubiloso de la parcela cósmica de la humanidad».
«Vuestras predicciones apocalípticas no tienen en cuenta los beneficios potenciales de la IA.» Si la IA no tuviera beneficios potenciales, no habría interés económico o social por impulsar su investigación, y por tanto no existiría el peligro de lograr una IA comparable a la humana. Esta objeción es como acusar a los ingenieros nucleares que trabajan en contención de no tener nunca en cuenta los beneficios potenciales de la electricidad barata. El triste hecho es que los beneficios potenciales de la energía nuclear no han conseguido materializarse, en gran medida, precisamente porque no se prestó la atención debida a los riesgos de contención en Three Mile Island y Chernóbil.
«No se puede controlar la investigación.» En la actualidad nadie sugiere que pueda limitarse la investigación sobre IA, solo que hay que prestar atención al problema de prevenir consecuencias negativas de sistemas mal diseñados. Pero, si es necesario, podemos controlar la investigación: no diseñamos genéticamente seres humanos porque los biólogos moleculares decidieron, en un taller celebrado en Asilomar en 1975, que sería una mala idea, aunque «mejorar las reservas de humanos» era, desde varias décadas antes, el objetivo de numerosos investigadores del campo de la biología.
«No conviene mencionar los riesgos, puede afectar la financiación.» Véanse energía nuclear, tabaco, calentamiento global.
Además de estas objeciones en el campo de las políticas a seguir, hay otras que proponen soluciones simples para evitar las consecuencias negativas de la IA superinteligente.
«En lugar de introducir objetivos en el sistema, dejar que elija los que quiera.» No está nada claro cómo solucionaría esto el problema. Los criterios de acuerdo a los cuales un sistema de IA elegiría sus propios objetivos pueden muy bien considerarse metaobjetivos, y de nuevo nos enfrentamos al problema de cómo asegurar que conducen a comportamientos consistentes con el bienestar humano. Tenemos que rectificar el timón, no tirarlo por la borda.
«Los humanos más inteligentes tienden a tener objetivos más loables y altruistas, lo mismo ocurrirá con las máquinas superinteligentes.» Más allá del hecho de que quienes defienden este argumento se consideran más listos que la mayoría, hay, de hecho, escasísimas pruebas de la validez de la premisa de este argumento, y la premisa no proporciona apoyo ninguno a la conclusión.
«No os preocupéis, tendremos equipos humanos-IA que trabajarán en colaboración.» Una mala alineación de los valores impide trabajar en equipo, así que esta solución pasa por contestar antes a la pregunta de cómo solucionar el problema central de alineamiento de valores.
«No hay que incluir en la ecuación objetivos humanos como la autoconservación.» Véase la reflexión sobre el argumento de Omohundro anterior. Para un robot que sirve cafés, la muerte no es algo malo en sí mismo. Pero sí algo a evitar, porque es complicado servir café si estás muerto.
«No pasa nada, se apaga y ya está.» Como si una entidad superinteligente no fuera a contar con esa posibilidad.
Soluciones
Bostrom (2014) considera un número de propuestas técnicas más serias para resolver el problema de control de la IA. Algunos, bajo el encabezamiento de «oráculo de IA», proponen encerrar las máquinas en una suerte de cortafuegos y extraer de ellas trabajo útil tipo pregunta-respuesta, pero sin permitirles jamás intervenir en el mundo real. (¡Por supuesto que, esto implica renunciar a los robots superinteligentes!) Por desgracia, es poco probable que algo así funcione, pues todavía no hemos inventado un cortafuegos que actúe de manera segura contra simples humanos, y mucho menos contra máquinas superinteligentes. Otros hablan de restricciones probadamente aplicables al comportamiento, pero diseñarlas es como intentar escribir una ley fiscal sin resquicios (¡con evasores fiscales superinteligentes además!),
¿Podríamos, en lugar de ello, abordar la advertencia de Wiener? ¿Podemos diseñar sistemas de IA cuyos propósitos no entren en conflicto con los nuestros, de manera que nuestra satisfacción con su manera de comportarse esté asegurada? No es algo nada sencillo, pero puede ser factible si seguimos tres principios centrales:
Resulta que estos tres principios, una vez incardinados en un marco matemático formal que defina el problema que la IA está inherentemente obligada a resolver, parecen permitir ciertos progresos en el problema de control de la IA. En particular, al menos en casos simples, podemos definir una plantilla para diseños de agentes probadamente beneficiosos bajo determinados supuestos razonables (si no ciertos).
Aprendizaje de funciones de recompensa
Para explicar el marco matemático, ser algo más precisos con la terminología ayuda. Según Von Neumann y Morgenstern (1994), a cualquier agente racional puede atribuírsele una función de utilidad U(s) que asigna un número real que representa la deseabilidad de existir en un estado del mundo particular cualquiera s. De modo equivalente, esta es la deseabilidad esperada de las posibles secuencias de estado futuras que empiezan por s, asumiendo que el agente actúa de forma óptima. (En investigación de operaciones, esto a menudo se conoce por función de valor, un término que tiene un significado distinto en economía.) Hay otra suposición posible de preferencias estacionarias (Koopmans 1972), según la cual la deseabilidad de una secuencia de estado cualquiera puede expresarse como una suma (que probablemente decrece con el tiempo) de recompensas inmediatas asociadas a cada estado de la secuencia. Por razones de conveniencia, la función de recompensa R(s, a, s’) se define de manera que sea la recompensa inmediata asociada a la transición del estado s al estado s’ mediante la acción a. Por lo general, la función recompensa proporciona una manera concisa de definir una tarea; por ejemplo, la tarea de jugar al backgammon puede definirse especificando que la recompensa sea = para todos los estados no terminales s’ y un número entre -192 y +192 para transiciones a estados terminales (el valor preciso dependerá del estado del cubo de doblar y de si el juego termina de una manera normal, con gammon o con backgammon). La utilidad de un estado de backgammon s, por otra parte, será en la mayoría de los casos una función muy compleja de s, porque representa una expectativa de secuencias de recompensa futuras respecto a todas los resultados posibles de los dados que se produzcan durante lo que queda de partida. Para una persona que está pasando un rato de disfrute en su jardín, las recompensas de oler una rosa pueden ser positivas (siempre que no la huela cien veces seguidas) y las de pincharse el dedo con las espinas negativas, mientras que la utilidad de estar en el jardín en ese momento dependerá de todas las recompensas futuras, y estas pueden variar enormemente en función de si uno está a punto de casarse, de cumplir una larga condena en la cárcel, etcétera.
En la medida en que sea posible definir de manera concisa objetivos especificando funciones de recompensa, el comportamiento puede explicarse de forma también concisa infiriendo funciones de recompensa. Esta es la idea clave que subyace en el llamado aprendizaje por refuerzo inverso (IRL, por sus siglas en inglés; Russell 1998; Ng y Russell 2000). Un algoritmo IRL aprende una función nueva observando el comportamiento de otro agente, del que se asume que actúa en consonancia con dicha función. El IRL es la forma secuencial de obtención de preferencias y está relacionado con el cálculo estructural de PDM (procesos de decisión de Márkov, en economía). Viendo a su dueño preparar café por la mañana, el robot doméstico aprende algo sobre la deseabilidad de tomar café en determinadas circunstancias, mientras que un robot de dueño inglés aprenderá sobre la deseabilidad de tomar el té en cualquier ocasión.
Resolver problemas sencillos de control de IA
Cabría imaginar que el IRL proporciona una solución sencilla al problema de alineamiento de valores: el robot observa el comportamiento humano, aprende la función de recompensa y se comporta de acuerdo a dicha función. Esta sencilla idea presenta dos problemas. El primero es obvio: el comportamiento humano (en especial por la mañana) a menudo transmite un deseo de tomar café, y el robot puede aprender esto, pero ¡no queremos que el robot quiera tomar café! Este defecto es fácil de solucionar; necesitamos reformular el problema de alineamiento de valores de manera que el robot siempre tenga el mismo objetivo de optimizar la recompensa para el humano (el principio 1 expuesto anteriormente) y se vuelva más capaz de hacerlo a medida que aprenda cuál es la función de recompensa humana.
El segundo problema es menos obvio y menos fácil de solucionar. Al humano le interesa asegurar que el alineamiento de valores se produzca de la forma más rápida y precisa posible, de forma que el robot pueda ser útil al máximo y se eviten errores potencialmente desastrosos. Sin embargo, actuar de forma óptima en la adquisición de café limitando al robot a un papel pasivo puede no ser la manera idónea de conseguir el alineamiento de valores. En lugar de ello, el humano tal vez debería explicar los pasos necesarios para preparar café, así como enseñar al robot dónde se guarda el café y qué hacer si se deja demasiado tiempo la cafetera encendida, mientras que el robot puede preguntar para qué sirve el botón de hacer espuma y probar a preparar café bajo la supervisión de un humano, incluso si los primeros resultados son imbebibles. Ninguna de estas posibilidades encaja en el marco del IRL.
Si se extiende el aprendizaje inverso por refuerzo de manera que incorpore como agentes tanto al robot como al humano, entonces es posible formular y solucionar un problema de alineamiento de valores, convirtiéndolo en un proceso de maximización de recompensa cooperativo e interactivo (Hadfield-Menell et al. 2017a). Más concretamente, un problema de aprendizaje inverso cooperativo por refuerzo (CIRL, por sus siglas en inglés) es una partida para dos jugadores con información parcial en la que el humano conoce la función de recompensa(2) y el robot no, pero la recompensa del robot es idéntica a la del humano. Por tanto, el CIRL encarna los tres principios enunciados anteriormente. Las soluciones óptimas a este juego maximizan la recompensa humana y pueden generar de forma natural instrucción activa por parte del humano y aprendizaje activo por parte del robot.
En el marco del CIRL, se puede formular y resolver el problema de desenchufar, es decir, el problema de evitar que un robot inutilice su botón de apagado. (Así Turing puede estar tranquilo.) Es seguro que un robot diseñado para resolver el problema del CIRL quiere maximizar valores humanos, pero también es seguro que no sabe con exactitud cuáles son. Ahora bien, el robot se beneficia de hecho de que lo apaguen porque entiende que el humano pulsará el interruptor para evitar que el robot haga alguna cosa contraria a los valores humanos. Así, el robot tiene un incentivo positivo para respetar el interruptor de apagado y este incentivo deriva directamente de su incertidumbre respecto a los valores humanos. Además, es posible demostrar que en algunos casos el robot es probadamente beneficioso, a saber, la recompensa esperada por el humano es mayor cuando hay un robot capaz de resolver problemas de CIRL con independencia de cuál sea la función de recompensa real del humano (Hadfield-Menell et al. 2017b).
El ejemplo del interruptor de apagado sugiere algunas fórmulas para el diseño de agentes controlables y nos proporciona al menos un caso de sistema de beneficio probado. El enfoque general guarda cierta similitud con el diseño de mecanismos de resolución de problemas en matemáticas, donde uno trata de incentivar a otros agentes para que se comporten de maneras que sean probadamente beneficiosas para el diseñador del mecanismo. La diferencia fundamental es que aquí estamos construyendo a uno de los agentes para que beneficie al otro.
El ejemplo de apagado funciona debido al principio 2, es decir, que el robot debería tener incertidumbre respecto a la verdadera función de recompensa del humano. Por extraño que parezca, la incertidumbre respecto a la recompensa ha sido ignorada casi por completo en IA, a pesar de que la incertidumbre respecto al conocimiento del campo de acción y la interpretación de sensores ha sido una preocupación central durante veinte años. La razón puede ser que la incertidumbre respecto a la función de recompensa es irrelevante en problemas de decisiones secuenciales estándar (procesos de decisión de Márkov o MDP, MDP parcialmente observables o POMDP y problemas de control óptimo), porque la política óptima con una función de recompensa incierta es idéntica a la política óptima con una función de recompensa definida equivalente al valor esperado de la función de recompensa incierta. Sin embargo, esta equivalencia solo se mantiene cuando el entorno no proporciona ulterior información sobre la verdadera función de recompensa, que no es el caso de problemas de CIRL, donde las acciones humanas revelan información sobre preferencias humanas. Cuando el entorno sí puede proporcionar información adicional sobre la función de recompensa, los agentes con incertidumbre respecto a esta pueden presentar comportamientos que no podrían realizar sistemas de IA tradicionales con funciones de recompensa fijas.
Un miembro de Team Valor prueba el robot THOR durante la preparación del Desafío Robótico (Robotics Challenge) de DARPA, la agencia de investigación de proyectos avanzados de defensa en el TREC (laboratorio de ingeniería y control de robótica terrestre) del Virginia Tech
En este punto, el lector familiarizado con el concepto de aprendizaje por refuerzo (RL, por sus siglas en inglés) podría aducir que la «señal recompensa» que recibe el agente RL después de cada transición estado-acción-estado sí proporciona información sobre la verdadera función de recompensa, porque da el valor real de R(s, a, s’) para la transición producida. Así pues, ¿podría el aprendizaje por refuerzo ordinario constituir una base para el alineamiento de valores si el humano se limita a suministrar una señal de recompensa directamente al robot? ¡Por fortuna no! En primer lugar, el humano puede no ser capaz de cuantificar la recompensa de forma precisa, ni siquiera para transiciones específicas ya experimentadas. En segundo lugar, el modelo formal de RL asume que la señal de recompensa le llega al agente de fuera del entorno; pero el humano y el robot son parte del mismo entorno, y el robot puede maximizar su recompensa modificando al humano de manera que le proporcione en todo momento una señal de recompensa máxima. Lo indeseable de este resultado, conocido como wireheading o estimulación directa (Muehlhauser y Hibbard 2014), pone de manifiesto un error de base en la formulación estándar del RL. El error es que el entorno no puede proporcionar una recompensa real al agente; tan solo información sobre la recompensa. Así, un humano que emite una «señal de recompensa» al robot no le está dando una recompensa, sino proporcionándole pruebas (probablemente ruidosas) de sus preferencias en forma de una acción que selecciona un número. Esta nueva formulación evita claramente el problema de wireheading porque el robot solo saldrá perdiendo si modifica la fuente de información para enmascarar la señal subyacente. Y si la formulación estipula que el robot tiene que maximizar la función de recompensa original, entonces modificar al humano de manera que tenga una función de recompensa nueva más sencilla de maximizar no le hace ningún bien al robot.
Consideraciones prácticas
He argumentado que el marco para el aprendizaje inverso por refuerzo puede ser el primer paso para una resolución teórica del problema de control en IA. Hay también razones para creer que el enfoque puede funcionar en la práctica. En primer lugar, hay ingentes cantidades de información escrita y filmada sobre humanos haciendo cosas (y otros humanos reaccionando). La tecnología necesaria para construir modelos de valores humanos a partir de estos archivos estará disponible mucho antes de que se creen sistemas de IA superinteligentes. En segundo lugar, existen incentivos muy poderosos y a corto plazo para que los robots entiendan los valores humanos: si un robot doméstico mal diseñado cocina al gato para cenar porque no entiende que su valor sentimental excede con mucho su valor nutricional, el sector de los robots domésticos quebrará. En el campo de los asistentes personales digitales, que probablemente se convertirá en un mercado importante antes de que termine la década, un asistente que se adapta con rapidez a las preferencias complejas y llenas de matices de su dueño presenta beneficios obvios.
Un enfoque basado en el aprendizaje de valores a partir del comportamiento humano, no obstante, plantea problemas evidentes. Los humanos son irracionales, incoherentes, pusilánimes y computacionalmente limitados, de manera que sus acciones no siempre reflejan sus valores (pensemos, por ejemplo, en dos humanos que juegan al ajedrez; por lo general uno de ellos pierde, ¡pero no adrede!). Los humanos también son diversos en cuanto a valores y circunstancias, lo que quiere decir que los robots deben ser receptivos a las preferencias individuales y mediar en conflictos de preferencias, un problema tanto para científicos sociales como para ingenieros. Y algunos humanos son malvados, así que el robot debe poder ser capaz de filtrar valores de sistemas individuales que sean incompatibles con el bienestar general.
Parece probable que los robots puedan aprender de comportamientos humanos no racionales solo con la ayuda de modelos cognitivos de humanos muy mejorados. ¿Y qué pasa con el comportamiento indeseable? ¿Es posible evitar corromper a nuestros robots sin imponer limitaciones adquiridas (y que por tanto varían según las culturas) a los valores que estamos dispuestos a permitir? Tal vez se pueda usar una versión del imperativo categórico de Kant, según la cual una función de recompensa que asignara valor negligible o negativo al bienestar de los demás carecería de autoconsistencia, en el sentido de que si todos operaran con dicha función de recompensa, entonces ninguno la obtendría.
Síntesis
He argumentado, siguiendo a numerosos autores, que encontrar una solución al problema de control de la IA es una tarea importante. Más concretamente y en las sonoras palabras de Bostrom, «la tarea esencial de nuestra época». También he argumentado que, hasta el momento, la IA se ha centrado en sistemas capaces de tomar mejor decisiones, pero que esto no es lo mismo que tomar decisiones mejores. Por muy excelentemente que maximice un algoritmo, y por muy preciso que sea su modelo del mundo, las decisiones de una máquina pueden ser estúpidas a los ojos de un humano normal y corriente si su función de utilidad no está bien alineada con los valores humanos.
Este problema exige cambiar la definición misma de IA, que debe dejar de ser un campo que se ocupa de la inteligencia pura, con independencia del objetivo, y ser uno que se ocupe de sistemas probadamente beneficiosos para los humanos. (Supongo que también podríamos diseñar sistemas de IA para otras especies, pero no creo que sea una prioridad ahora mismo.) Tomarse en serio el problema ha dado lugar a nuevas maneras de enfocar la IA, sus propósitos y nuestra relación con ella.
Notas
1. Existen otros posibles riesgos del uso indebido de una IA cada vez más potente, incluidos la vigilancia automática y la persuasión, las armas autónomas y la disrupción económica; deben ser estudiadas en profundidad, pero no son el tema del presente artículo.
2. Cabría preguntarse: ¿por qué un humano que conoce la función de recompensa no se limita a programarla en el robot? Aquí usamos «saber» en el sentido restringido de como si uno conociera la función de recompensa, sin ser necesariamente capaz de hacerla explícita. Es como cuando un humano «conoce» la diferencia de pronunciación entre la letra g en gente y en guante sin ser capaz de poner por escrito la regla ortográfica.
Bibliografía
— Bostrom, N., Superintelligence, Oxford, Oxford University Press, 2014 [Ed. esp. Superinteligencia, Zaragoza, Teell, 2016].
— Etzioni, O., «Are the Experts Worried About the Existential Risk of Artificial Intelligence?», en MIT Technology Review, 2016.
— Good, I. J., «Speculations Concerning the First Ultraintelligent Machine», en Alt, F. L. y Rubinoff, M. (eds.), Advances in Computers 6, Nueva York, Academic Press, 1965.
— Hadfield-Menell, D., Dragan, A., Abbeel, P. y Russell, S., «Cooperative Inverse Reinforcement Learning», en Advances in Neural Information Processing Systems 25, Cambridge, Massachusetts, The MIT Press, 2017a.
— Hadfield-Menell, D., Dragan, A., Abbeel, P. y Russell, S., «The off-switch», en la 31ª Conferencia AAAI sobre Inteligencia Artificial (AAAI-17), 2017b.
— Koopmans, T. C., «Representation of Preference Orderings over Time», en McGuire, C. B. y Radner, R. (eds.), Decision and Organization, Ámsterdam, Elsevier/North-Holland, 1972.
— Minsky, M., «Afterword to Vernor Vinge’s novel, “True Names”», manuscrito inédito, 1984.
— Muehlhauser, L. y Hibbard, B., «Exploratory Engineering in Artificial Intelligence», en Communications of the ACM, vol. 57, n.º 9, 2014, pp. 32-34.
— Müller, V. C. y Bostrom, N., «Future Progress in Artificial Intelligence: A Survey of Expert Opinion», en Müller, V. C. (ed.), Fundamental Issues of Artificial Intelligence, Berlín, Springer, Synthèse Library, vol. 376, 2016.
— Ng., A. Y. y Russell, S., «Algorithms for Inverse Reinforcement Learning», Actas de la XVII Conferencia Internacional sobre Aprendizaje Automático, Stanford, California, Morgan Kaufmann, 2000.
— Omohundro, S. M., «The Basic AI Drives», en Proceedings of the First AGI Conference, IOS Press, 2008.
— Russell, S., «Learning Agents for Uncertain Environments (extended abstract)», en Proc. COLT-98, Madison, Wisconsin, ACM Press, 1998.
— Stone, P. et al., «Artificial Intelligence and Life in 2030», en One Hundred Year Study on Artificial Intelligence, informe del Panel de Estudio 2015, Universidad de Stanford, septiembre de 2016.
— Turing, A. M., «Can digital Machines Think?», 1951. Conferencia retransmitida por la BBC, transcripción en inglés en turingarchive.org
— Von Neumann, J. y Morgenstern, O., Theory of Games and Economic Behavior, 1ª ed., Princenton, Princeton University Press, 1944.
— Wiener, N., «Some Moral and Technical Consequences of Automation», en Science, vol. 131, n.º 3.410, 1960, pp. 1.355-1.358.